PEIXONAUTA
INTRODUÇÃO
Peixonauta é o nosso projeto para a RoboSub de 2025, ele é uma coleção de aprendizados que adiquirimos com o Iara que traz além de uma abordagem para a competição, uma abordagem comercial também.
Peixonauta conta com sete propulsores e controle em arquitetura em cascata para maior estabilidade. O sistema elétrico foi redesenhado com baterias hot-swappable e uma Jetson Orin central, permitindo percepção avançada com YOLOv5n e SLAM com RTAB-Map. O design mecânico foi otimizado por topologia, e a lógica de missão utiliza uma estrutura modular em Behavior Tree, garantindo escalabilidade e eficiência.
O PROJETO
SISTEMA MECâNICO
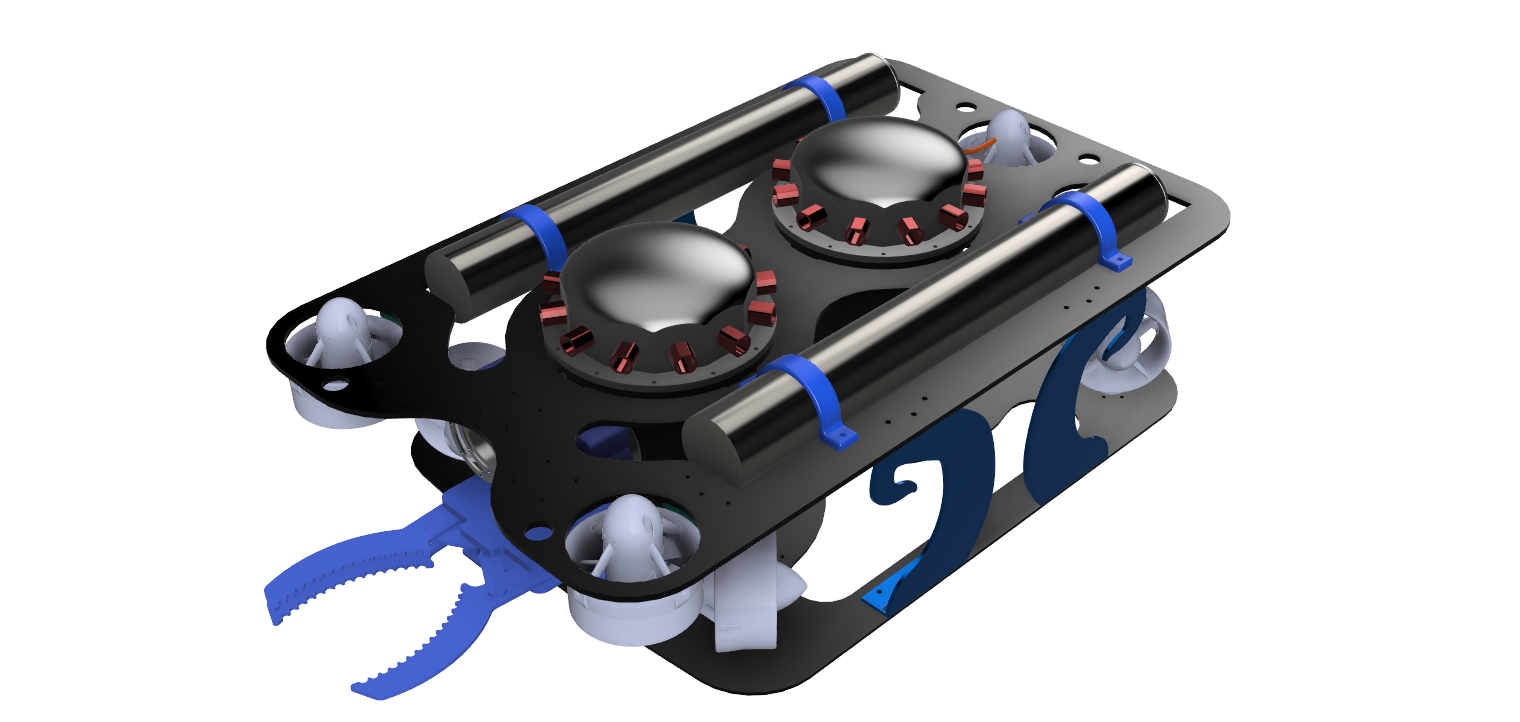
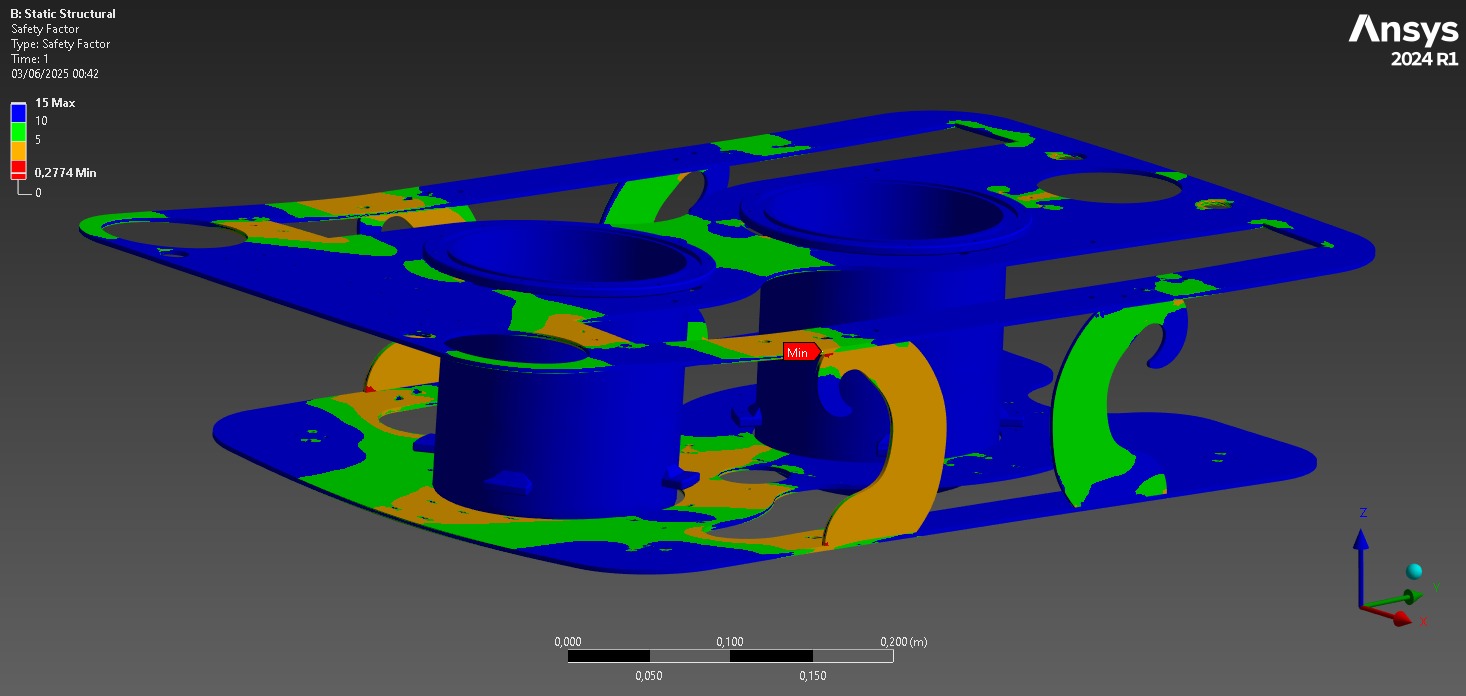
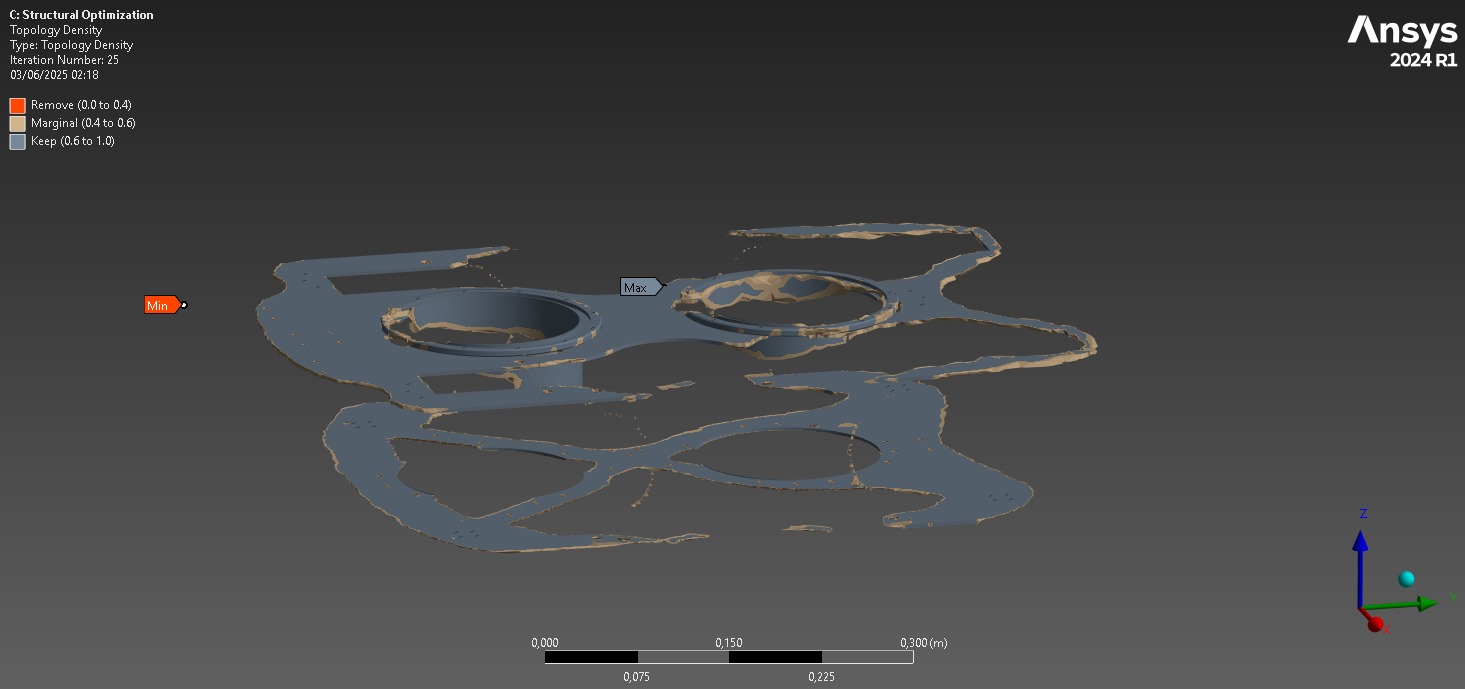
O novo AUV apresenta um design mais compacto e otimizado, com estrutura principal usinada em alumínio 6061-T6, resistente à corrosão e mecanicamente robusto. Foi projetado para suportar profundidades de até 300 metros, com vedação garantida por o-rings e conectores submarinos de engate rápido. A tampa traseira foi totalmente projetada e usinada pela equipe, com formato oval e penetradores laterais para melhor organização dos cabos. A estrutura é modular, leve e fácil de montar e manter.
ESTRUTURA
O novo AUV foi projetado com foco em robustez e desempenho, a estrutura projetada com resistência a pressões elevadas e otimizada via análise topológica e resistência à corrosão. A tampa traseira foi completamente projetada pela equipe, com formato oval para suportar maior pressão com menor espessura, além de possuir os penetradores posicionados lateralmente para evitar acúmulo de cabos na parte superior.
MONTAGEM E MÓDULOS
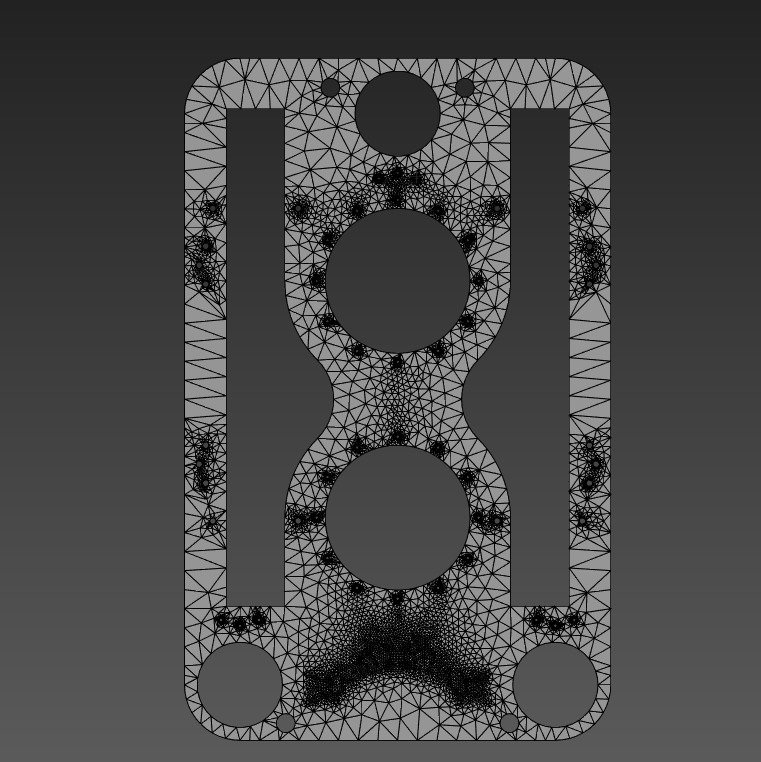
O conceito da montagem do AUV é ser modular, facilitando manutenção, transporte e a adição de novos módulos. Placas com recortes otimizados por análise topológica alojam os cilindros de bateria, reduzindo peso e melhorando o centro de gravidade. As flanges do casco funcionam como suportes estruturais, reforçadas por espaçadores de aço-carbono. A fixação é feita com parafusos M3/M4, arruelas inox e porcas autofrenantes, garantindo firmeza mesmo sob vibrações.

SISTEMA ELÉTRICO
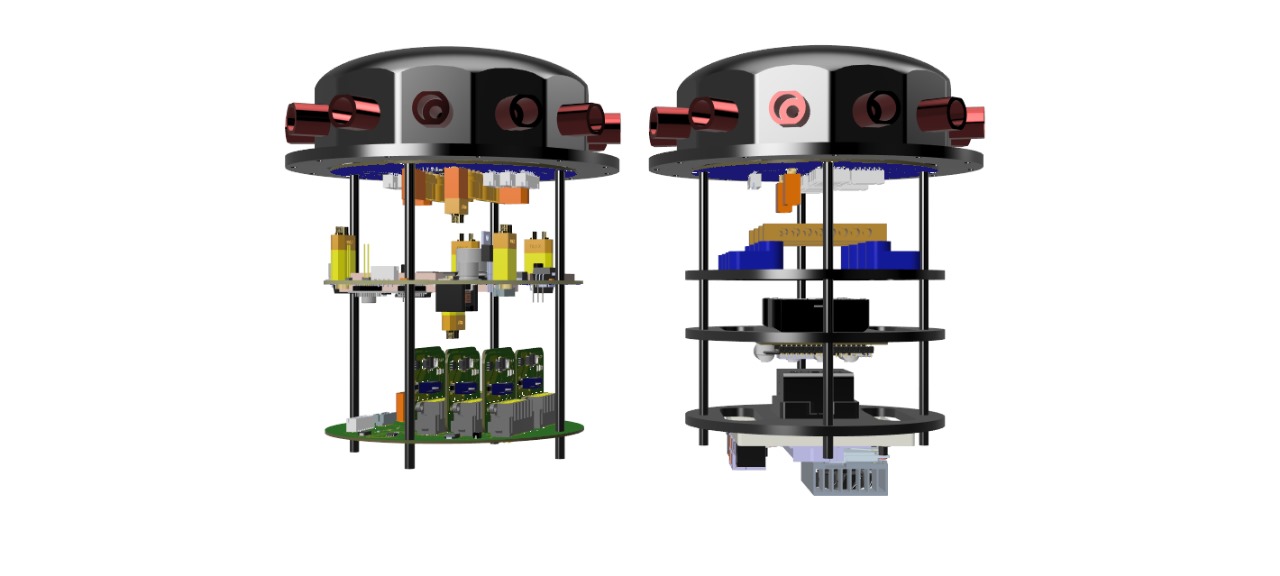
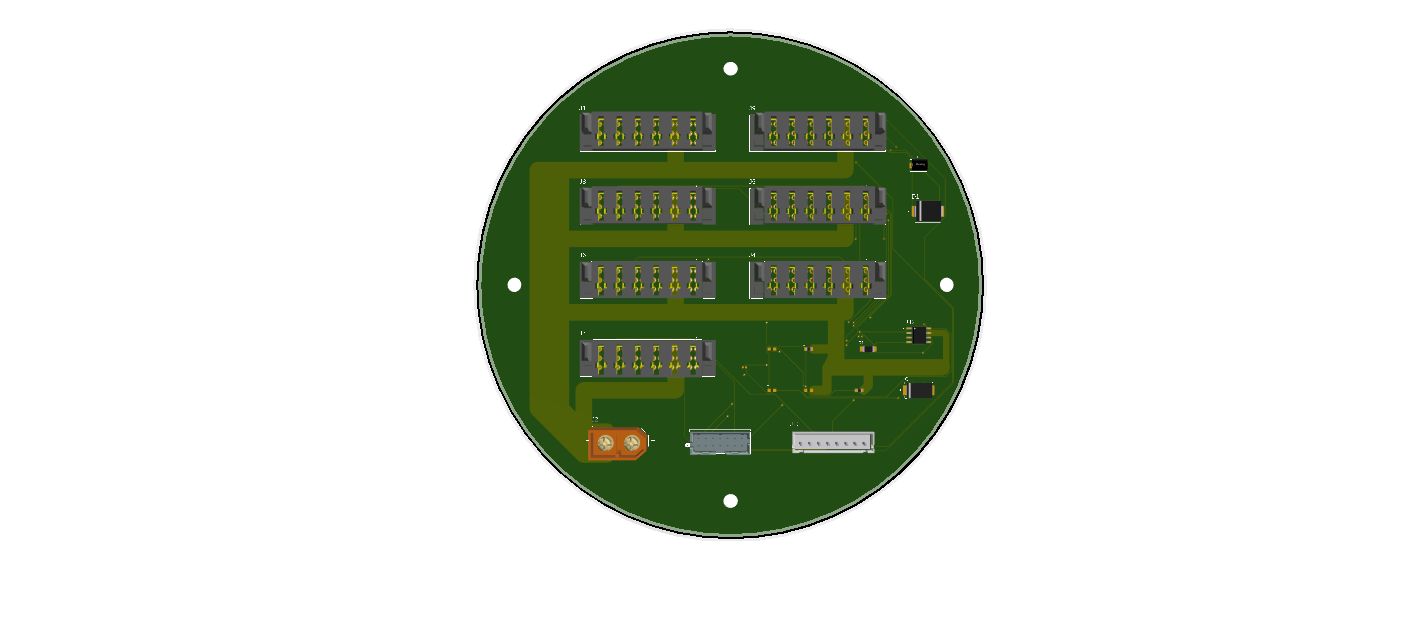
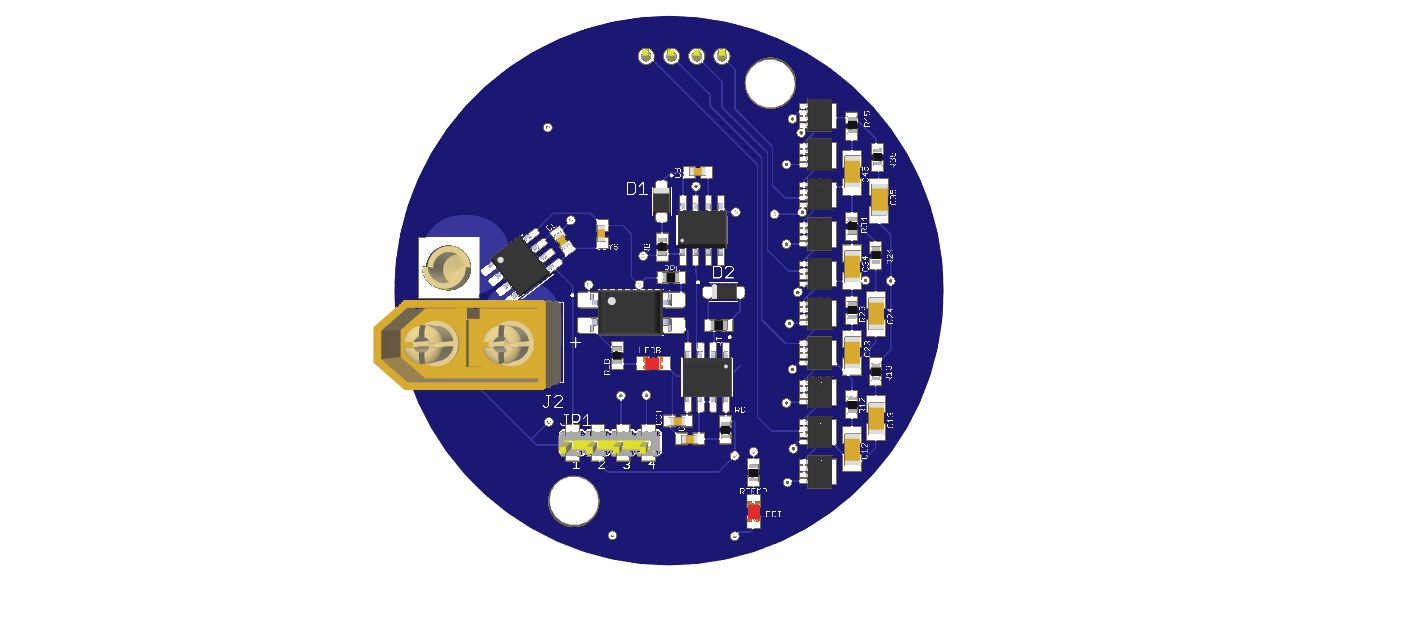
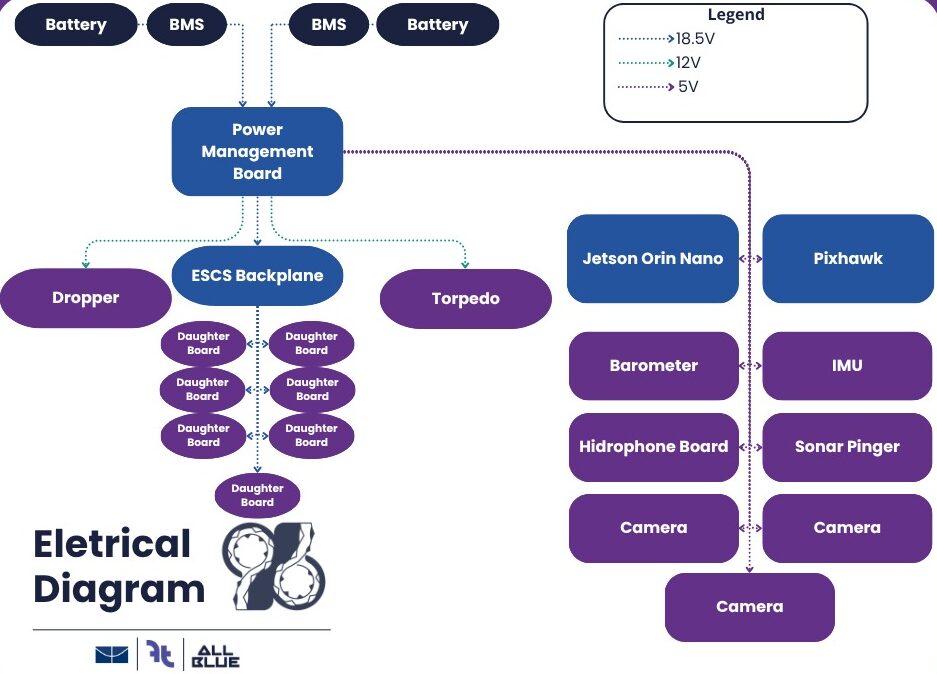
O AUV Peixonauta recebeu um novo arranjo interno visando modularidade, facilidade de manutenção e melhor dissipação térmica. Seus componentes foram distribuídos em dois cilindros de alumínio: um dedicado ao controle e outro aos atuadores e à placa de gerenciamento de energia. O sistema de propulsão foi organizado em placas Backplane e Daughter Boards para distribuição de potência e sinais de controle. As baterias foram reformuladas em dois packs independentes e hot-swappable, armazenados em cilindros de titânio com BMS integrado. Esse novo arranjo garante maior eficiência energética e continuidade de operação durante a recarga.
ARQUITETURA ELÉTRICA
A estrutura interna é dividida em dois cilindros: o de controle abriga a Jetson Orin, responsável por navegação e visão computacional, e a Pixhawk, que processa os sensores e comanda os atuadores. O cilindro de potência concentra os propulsores, a PMB e a eletrônica de acionamento. Os thrusters são controlados por uma placa Backplane central que distribui energia e sinais para as Daughter Boards, ligadas por conectores de fácil acoplamento. Filtros de ruído e capacitores de desacoplamento foram aplicados para garantir integridade dos sinais e estabilidade na entrega de potência.
SISTEMA DE BATERIAS
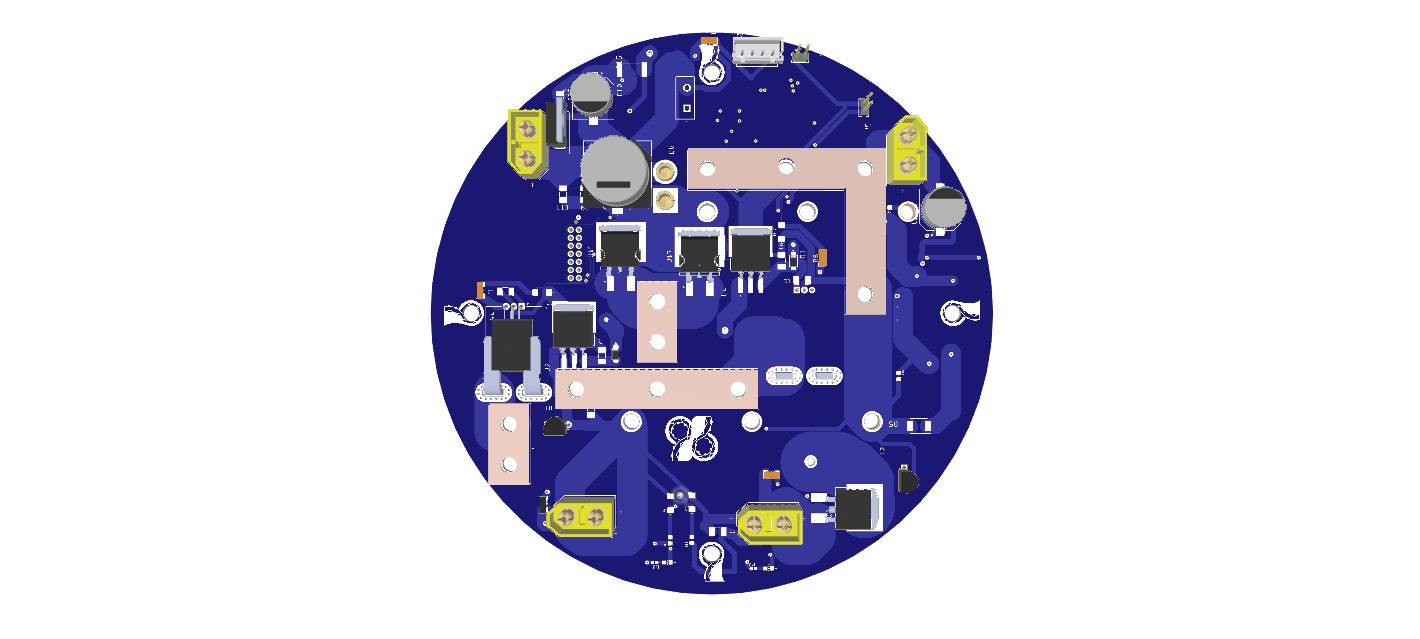
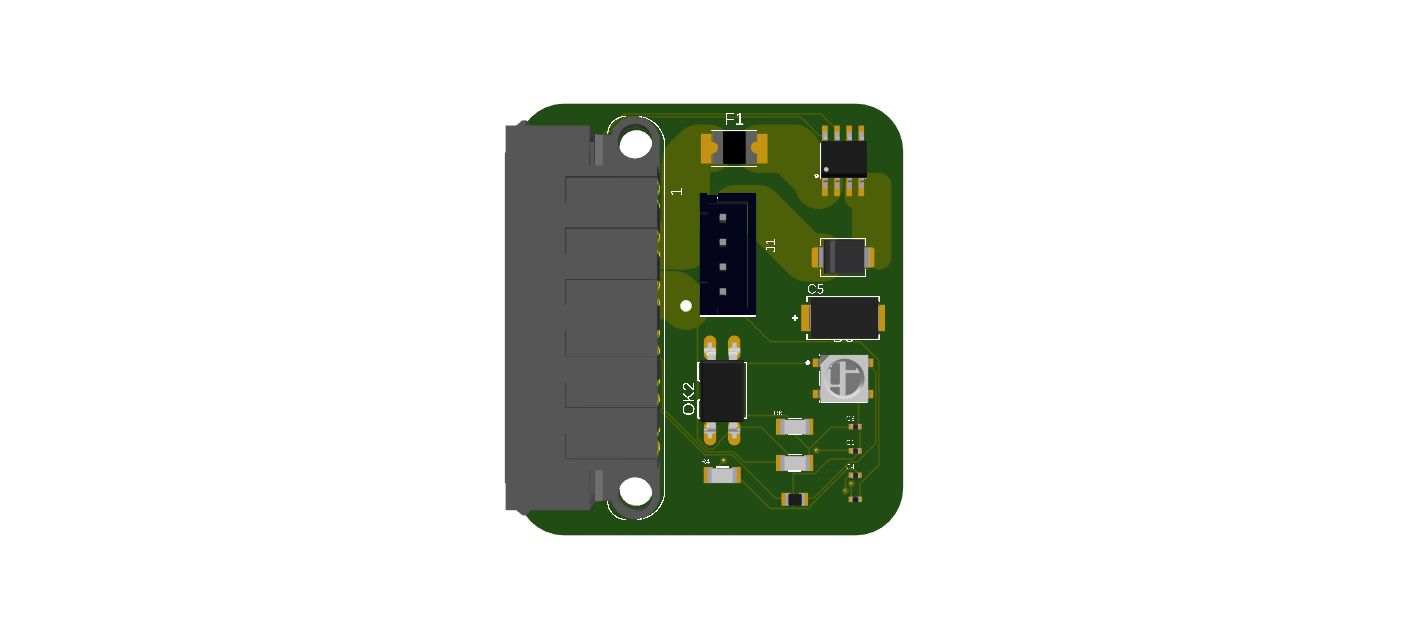
O sistema utiliza dois packs de baterias de íons de lítio com 18,5 V e 20 Ah cada, armazenados em cilindros de titânio com BMS independente, permitindo troca rápida (hot-swap) sem desligar o AUV. O BMS monitora dados com um ESP32, realiza balanceamento com técnica de capacitores chaveados e protege contra sobrecargas. A nova Power Management Board gerencia a entrada e saída de energia, regulando tensões de 5V, 12V e 18,5V. Um ventilador foi adicionado para resfriar os reguladores e manter a estabilidade térmica durante o funcionamento contínuo.
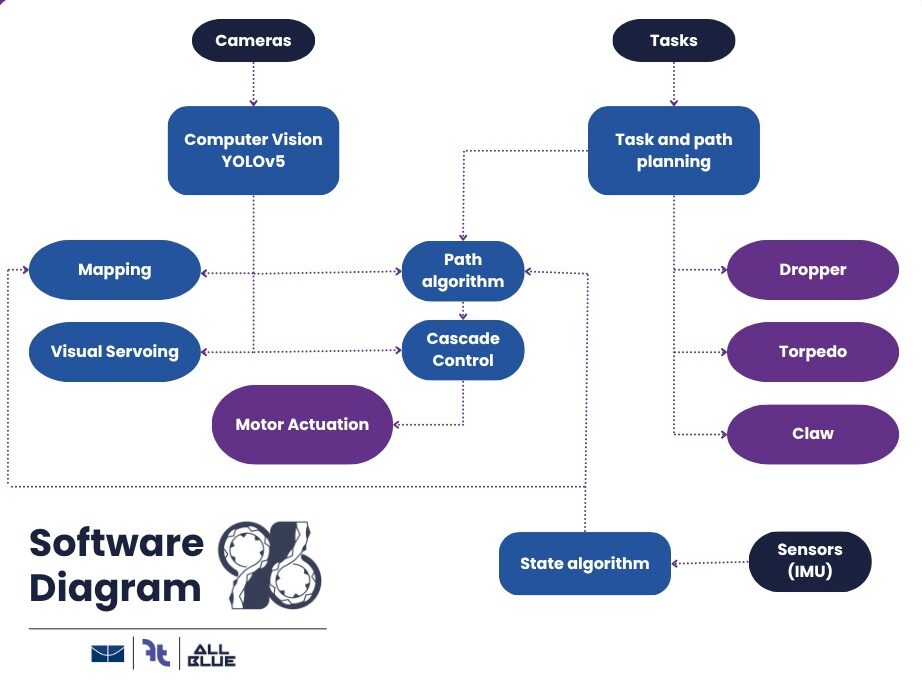
SISTEMA DE SOFTWARE
Peixonauta manteve o ambiente de simulação integrado entre Unity e ROS, permitindo testes realistas com física hidrodinâmica e sensores simulados. A navegação autônoma foi aprimorada com mapeamento 3D em tempo real e redes neurais mais precisas para visão computacional. O sistema de controle foi reestruturado para operar com sete propulsores, mantendo estabilidade e resposta precisa. A lógica das missões é organizada por uma estrutura modular de Behavior Tree. Esses avanços possibilitam maior robustez e flexibilidade nas estratégias do robô em diferentes tarefas e cenários subaquáticos.
VISÃO E MAPEAMENTO
O sistema de visão foi atualizado com a rede YOLOv5n na Jetson Orin, oferecendo maior precisão na detecção de pequenos objetos em tempo real. Essa rede é complementada por segmentação HSV, aumentando a robustez em diferentes condições de iluminação. Os dados de detecção são integrados a uma Behavior Tree, guiando as ações do AUV. Para mapeamento e navegação, o RTAB-Map é alimentado por câmeras estéreo, IMU e sensor de pressão, criando mapas 3D do ambiente em tempo real e permitindo planejamento de trajetórias seguras com desvio de obstáculos.
CONTROLE
O controle do AUV foi ajustado para sete propulsores, mantendo estabilidade e eficiência. A arquitetura utiliza Visual Servoing para alinhar o veículo com alvos detectados, com base na inversão da matriz intrínseca da câmera. Um Filtro de Kalman Estendido estima os parâmetros visuais em tempo real, gerando comandos que minimizam o erro de posicionamento. A estrutura de controle é implementada no ROS, garantindo integração fluida com os demais sistemas e adaptabilidade às diferentes condições das tarefas.