
IARA
INTRODUÇÃO
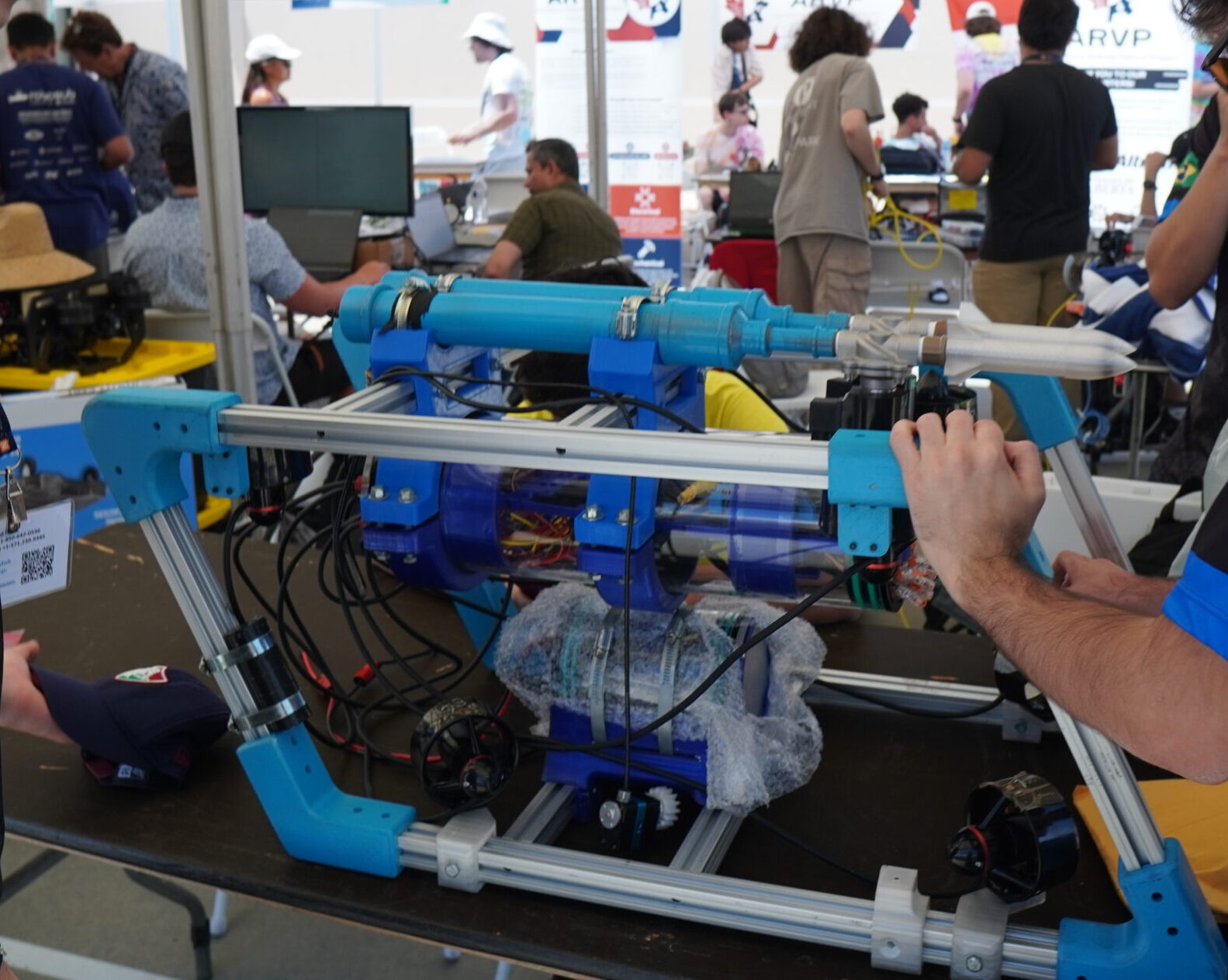
O Iara é o primeiro A.U.V da equipe, ele foi produzido em 2024 para realizar a competição do mesmo ano.
Afim de atingir os desafios propostos na competição, o Iara é equipado com 8 motores e câmeras para o mapeamento.

O PROJETO
SISTEMA MECâNICO
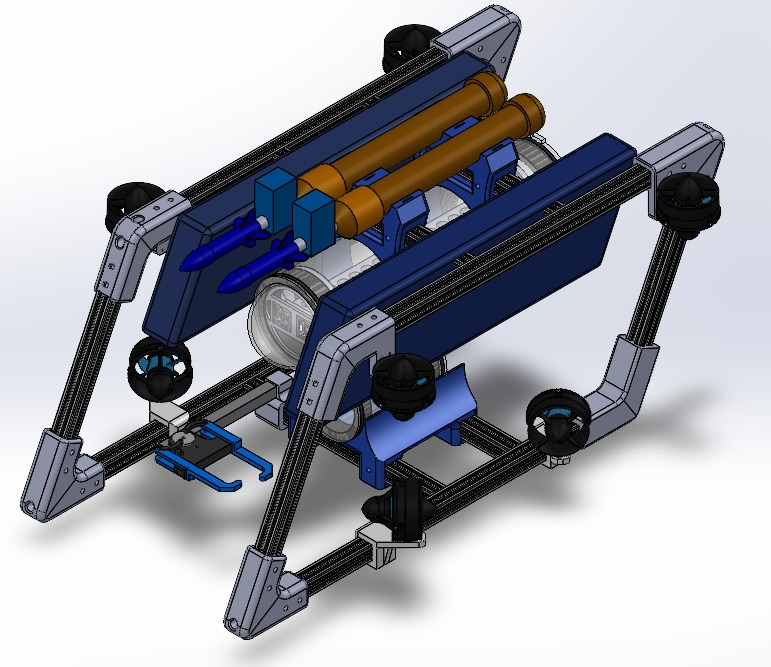
Os materiais que constituem o A.U.V como os cilindros de acrílico, as braçadeiras de alumínio e os suportes de resina o permitem chegar a incríveis 30 metros de profundidade. Essa medida foi analisada conforme nossas simulações de esforços. Além disso ele foi projetado com módulos para completar as tarefas da competição.
LANÇADOR DE TORPEDOS
O lançador de torpedo foi desenvolvido com base no princípio de foguetes de garrafa PET, utilizando um tanque de pressão em PVC selado para armazenar ar comprimido. A liberação do ar, controlada por uma válvula solenóide, gera a força de propulsão necessária. O torpedo, impresso em 3D com formato hidrodinâmico, recebeu lastro para ajuste de densidade e flutuabilidade.
GARRA
A garra foi projetada com dois dedos cruzados para capturar amostras cilíndricas de diferentes formatos na missão de coleta. Seu tamanho foi ajustado às limitações das cestas de coleta e funciona com um servomotor subaquático e engrenagens. A garra fica próxima ao casco principal, permitindo que a câmera acompanhe tanto a garra quanto as amostras.






SISTEMA ELÉTRICO
O AUV possui sistemas dedicados para executar as tarefas da competição, como o lançador de torpedos com ar comprimido, o sistema de liberação de marcadores com ímãs de neodímio e uma garra de dois dedos cruzados para coleta de amostras. Cada mecanismo foi projetado com foco em eficiência, confiabilidade e facilidade de controle subaquático. Todos os componentes foram posicionados estrategicamente para favorecer o desempenho hidrodinâmico e a visibilidade pelas câmeras.
ARQUITETURA ELÉTRICA
O controle do robô é feito por duas placas: a Pixhawk, que processa dados de sensores para navegação e estabilidade, e a Jetson Nano, que realiza o processamento de visão e IA. A comunicação entre sensores, atuadores e placas ocorre por I2C, USB e PWM. Câmeras e sensores são alimentados diretamente por essas placas. A arquitetura elétrica garante integração confiável e resposta rápida durante a operação subaquática.
SISTEMA DE ALIMENTAÇÃO
A alimentação é feita por três baterias 4S de 14,8V ligadas em paralelo, conectadas a uma placa de gerenciamento OpenROV. Essa placa regula e distribui tensões (12V, 5V, 3,3V) com proteção contra sobrecorrente e curtos. Também permite o monitoramento do consumo e do estado das baterias em tempo real. Isso assegura autonomia e segurança durante as missões subaquáticas.
SISTEMA DE SOFTWARE
O sistema de software do AUV integra simulação, visão computacional, mapeamento e controle de forma coesa. Utilizando Unity e ROS, foi criado um ambiente virtual realista para testes, acelerando o desenvolvimento e evitando riscos físicos. Além disso, algoritmos de visão, navegação e controle são empregados para garantir autonomia e precisão nas missões subaquáticas.
VISÃO E MAPEAMENTO
O sistema de visão usa a rede SSD MobileNet V2 na Jetson Nano para detectar e classificar objetos em tempo real. As informações visuais alimentam uma máquina de estados e são aplicadas em Visual Servoing, ajustando os movimentos com base na imagem da câmera. Para mapeamento, o RTAB-MAP é utilizado com câmeras estéreo, IMU e sensor de pressão para criar um mapa 3D e planejar rotas seguras no ambiente subaquático.
CONTROLE
O controle do AUV é baseado em um modelo dinâmico com Computed Torque Control (CTC), que permite controlar posição e orientação de forma independente. Um Filtro de Kalman Unscented (UKF) estima os estados em tempo real para uso no controle e mapeamento. A arquitetura é dividida em laços interno e externo, onde o externo define velocidades desejadas com base na navegação ou visão, e o interno executa os comandos com precisão.


