IARA
INTRODUCTION
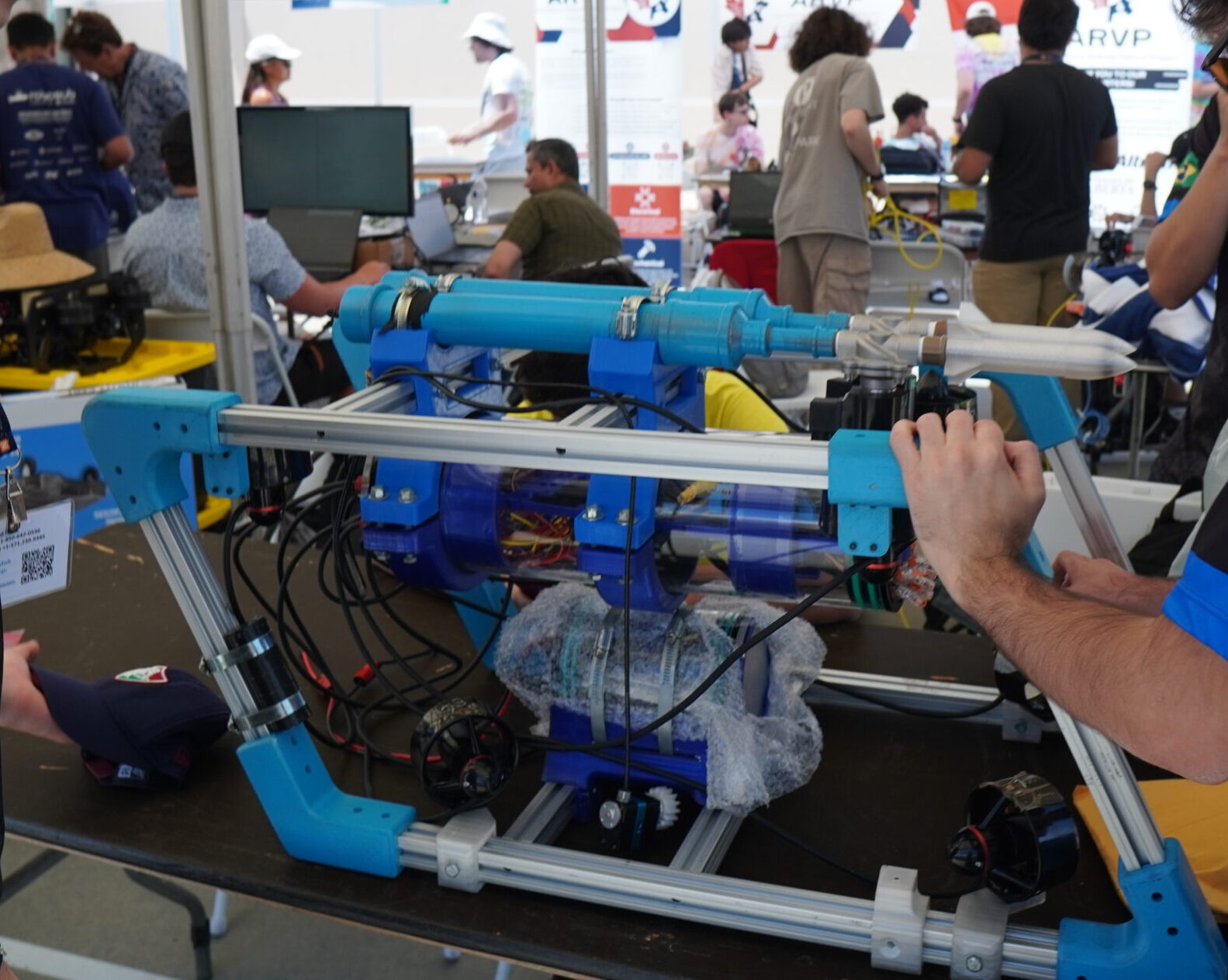
Iara is the team’s first A.U.V., it was produced in 2024 to carry out the competition of the same year.
In order to meet the challenges proposed in the competition, Iara is equipped with 8 engines and cameras for mapping.

THE PROJECT
MECHANICAL SYSTEM
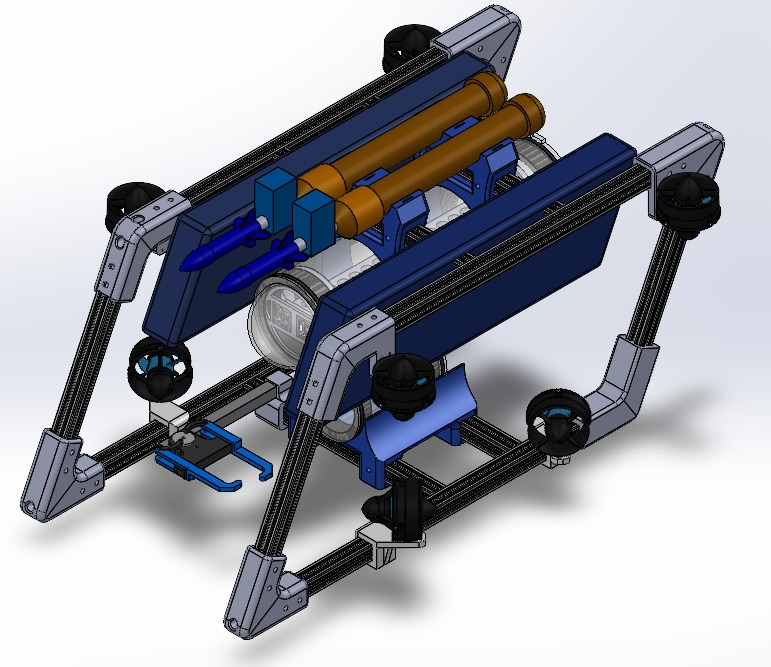
The materials that make up the A.U.V., such as acrylic cylinders, aluminum clamps and resin supports, allow it to reach an incredible depth of 30 meters. This measurement was analyzed according to our stress simulations. In addition, it was designed with modules to complete the tasks of the competition.
TORPEDO LAUNCHER
O lançador de torpedo foi desenvolvido com base no princípio de foguetes de garrafa PET, utilizando um tanque de pressão em PVC selado para armazenar ar comprimido. A liberação do ar, controlada por uma válvula solenóide, gera a força de propulsão necessária. O torpedo, impresso em 3D com formato hidrodinâmico, recebeu lastro para ajuste de densidade e flutuabilidade.
GRIPPER
The gripper is designed with two crossed fingers to capture cylindrical samples of different shapes during the collection mission. Its size has been adjusted to the limitations of the collection baskets and is powered by an underwater servomotor and gears. The gripper is located close to the main hull, allowing the camera to track both the gripper and the samples.






ELECTRICAL SYSTEM
The AUV has dedicated systems to perform the competition tasks, such as the compressed air torpedo launcher, the marker release system with neodymium magnets and a two-finger cross-clamp gripper for sample collection. Each mechanism was designed with a focus on efficiency, reliability and ease of underwater control. All components were strategically positioned to favor hydrodynamic performance and visibility by cameras.
ELECTRICAL ARCHITECTURE
The robot is controlled by two boards: the Pixhawk, which processes sensor data for navigation and stability, and the Jetson Nano, which performs vision and AI processing. Communication between sensors, actuators, and boards occurs via I2C, USB, and PWM. Cameras and sensors are powered directly by these boards. The electrical architecture ensures reliable integration and fast response during underwater operation.
POWER SUPPLY SYSTEM
Power is provided by three 4S 14.8V batteries connected in parallel, connected to an OpenROV management board. This board regulates and distributes voltages (12V, 5V, 3.3V) with protection against overcurrent and short circuits. It also allows monitoring of battery consumption and status in real time. This ensures autonomy and safety during underwater missions.
SOFTWARE SYSTEM
The AUV’s software system integrates simulation, computer vision, mapping and control in a cohesive manner. Using Unity and ROS, a realistic virtual environment for testing was created, accelerating development and avoiding physical risks. In addition, vision, navigation and control algorithms are employed to ensure autonomy and precision in underwater missions.
VISION AND MAPPING
The vision system uses the MobileNet V2 SSD network on the Jetson Nano to detect and classify objects in real time. Visual information is fed into a state machine and applied to Visual Servoing, adjusting movements based on the camera image. For mapping, RTAB-MAP is used with stereo cameras, an IMU, and a pressure sensor to create a 3D map and plan safe routes in the underwater environment.
CONTROL
The AUV’s control is based on a dynamic model with Computed Torque Control (CTC), which allows position and orientation to be controlled independently. An Unscented Kalman Filter (UKF) estimates the states in real time for use in control and mapping. The architecture is divided into inner and outer loops, where the outer loop sets desired speeds based on navigation or vision, and the inner loop executes the commands precisely.


