PEIXONAUTA
INTRODUCTION
Peixonauta is our project for RoboSub 2025, it is a collection of learnings that we acquired with Iara that brings, in addition to an approach to competition, a commercial approach as well.
Peixonauta features seven thrusters and cascaded control architecture for greater stability. The electrical system has been redesigned with hot-swappable batteries and a central Jetson Orin, enabling advanced perception with YOLOv5n and SLAM with RTAB-Map. The mechanical design has been topology-optimized, and the mission logic uses a modular Behavior Tree structure, ensuring scalability and efficiency.
THE PROJECT
MECHANICAL SYSTEM
The new AUV features a more compact and optimized design, with a main structure machined from corrosion-resistant and mechanically robust 6061-T6 aluminum. It is designed to withstand depths of up to 300 meters, with sealing guaranteed by o-rings and quick-release subsea connectors. The rear cover was entirely designed and machined by the team, with an oval shape and side penetrators for better cable management. The structure is modular, lightweight and easy to assemble and maintain.
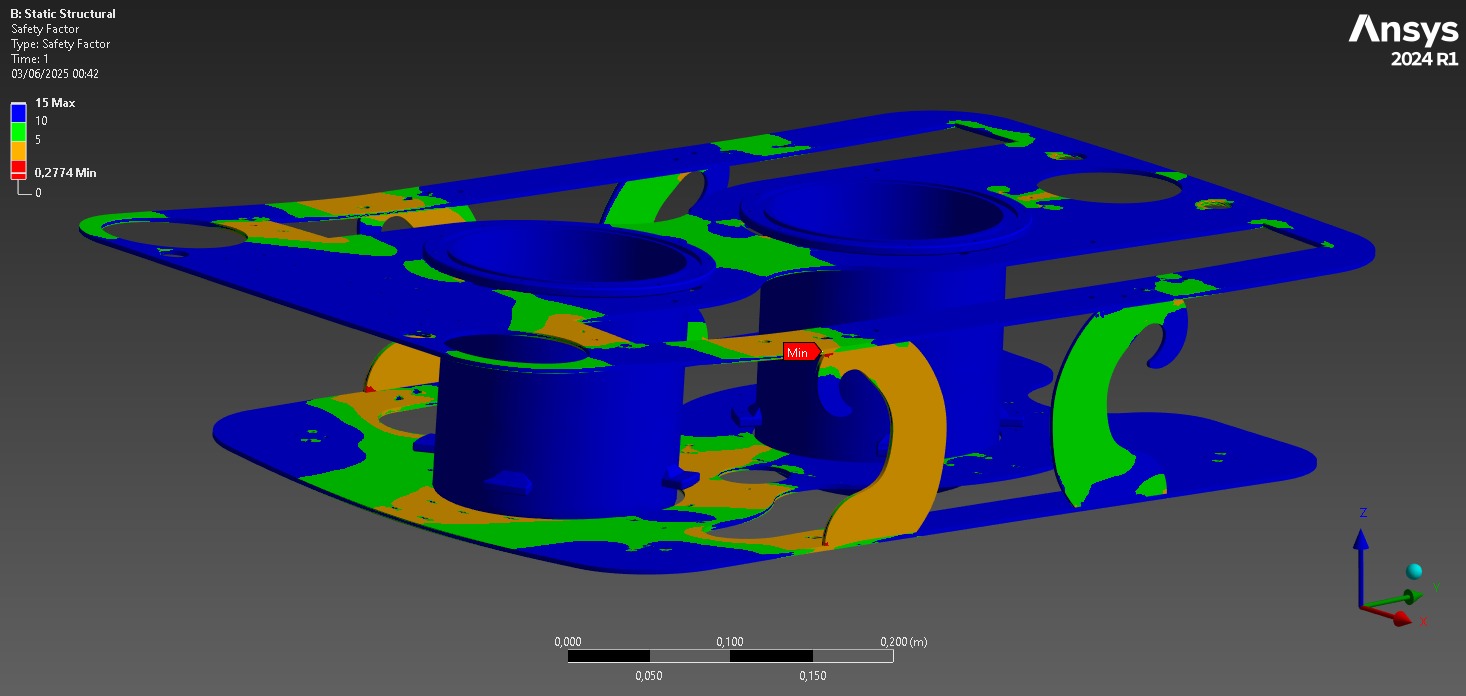
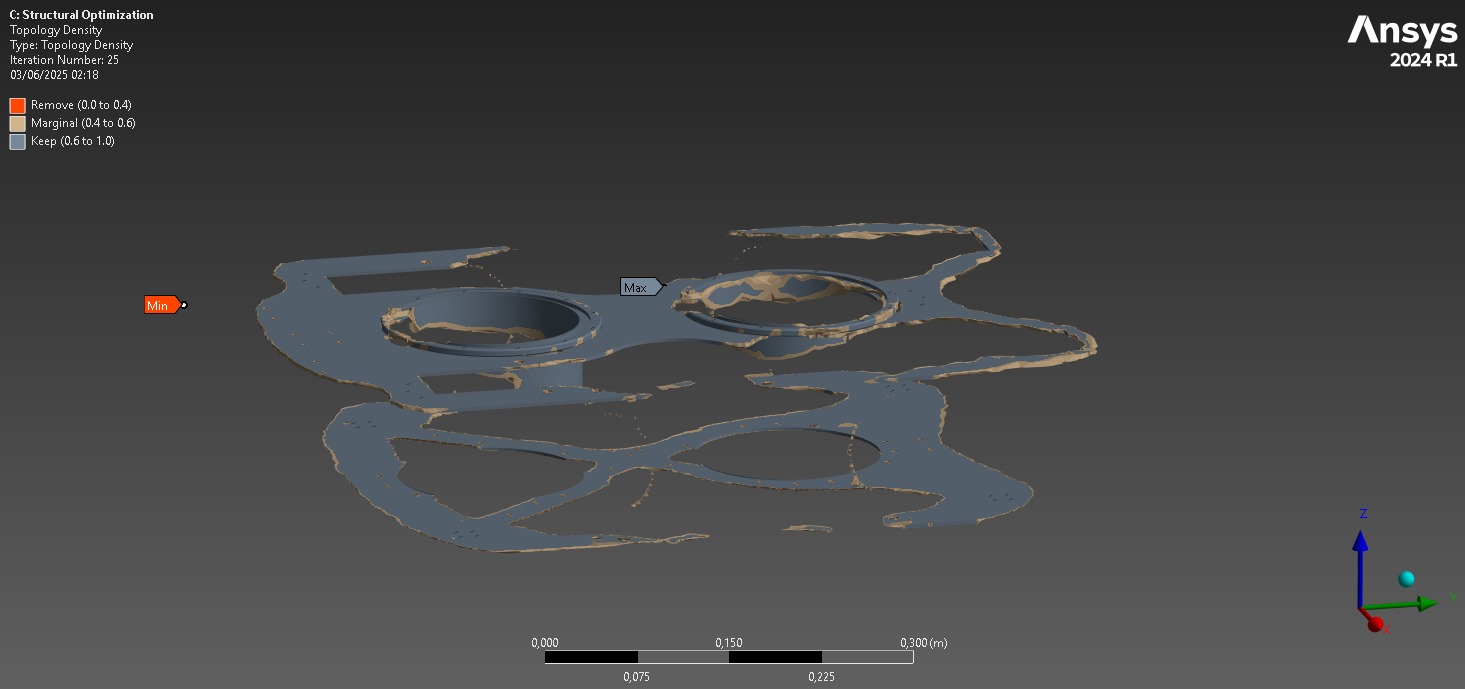
STRUCTURE
The new AUV was designed with a focus on robustness and performance, with a structure designed to withstand high pressures and optimized through topological analysis and corrosion resistance. The rear cover was completely designed by the team, with an oval shape to withstand greater pressure with less thickness, in addition to having the penetrators positioned laterally to avoid cable accumulation in the upper part.
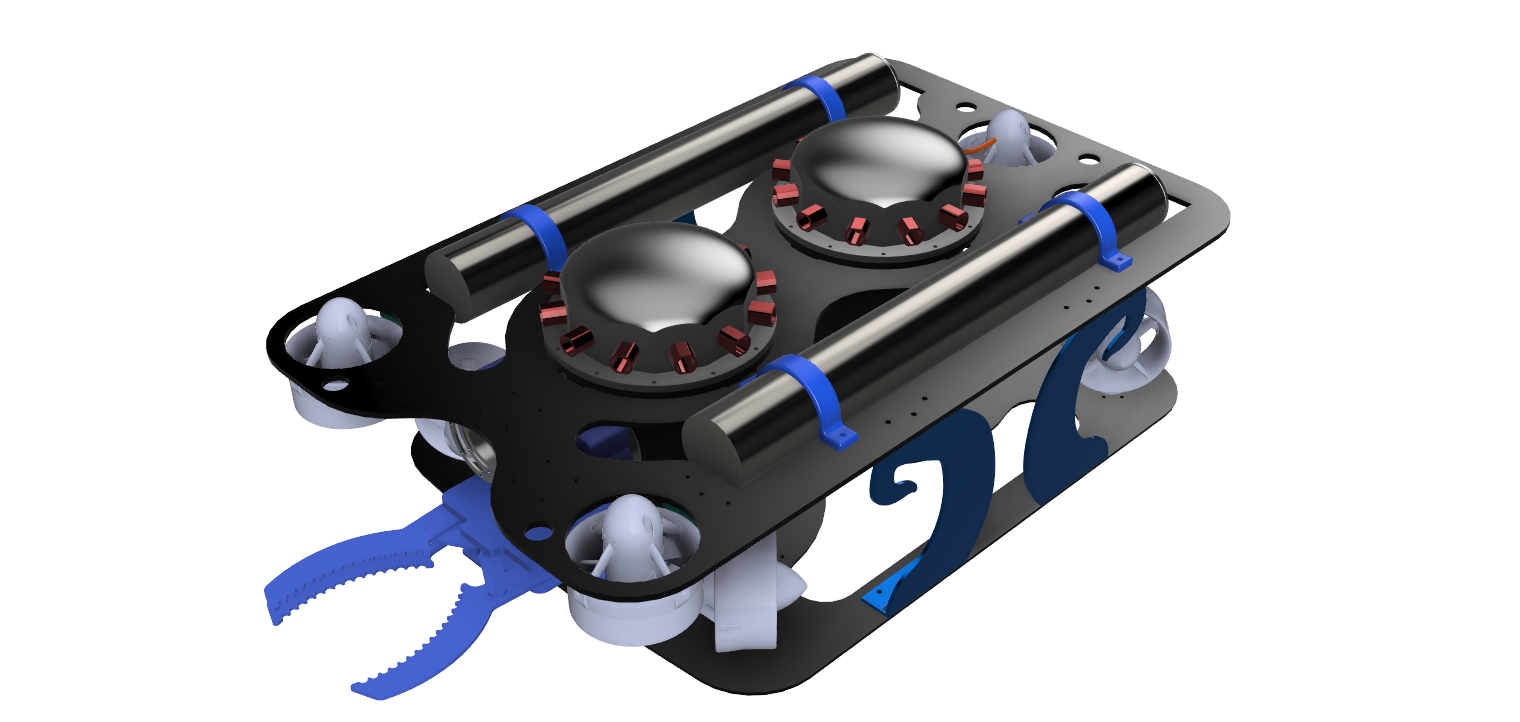
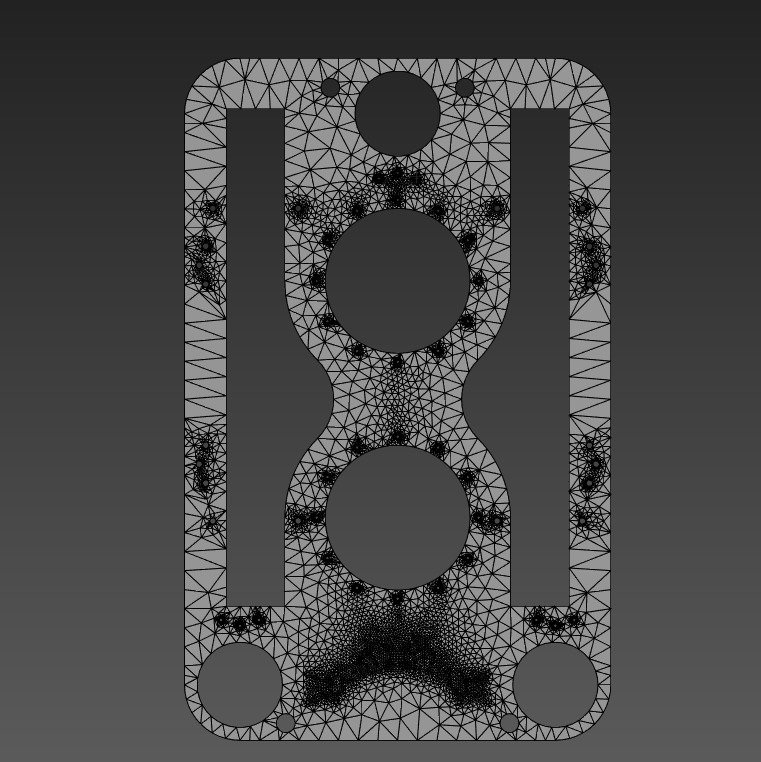
ASSEMBLY AND MODULES
The AUV assembly concept is modular, facilitating maintenance, transportation and the addition of new modules. Plates with cutouts optimized by topological analysis house the battery cylinders, reducing weight and improving the center of gravity. The hull flanges act as structural supports, reinforced by carbon steel spacers. The fastening is done with M3/M4 screws, stainless steel washers and self-locking nuts, ensuring firmness even under vibrations.

ELECTRICAL SYSTEM
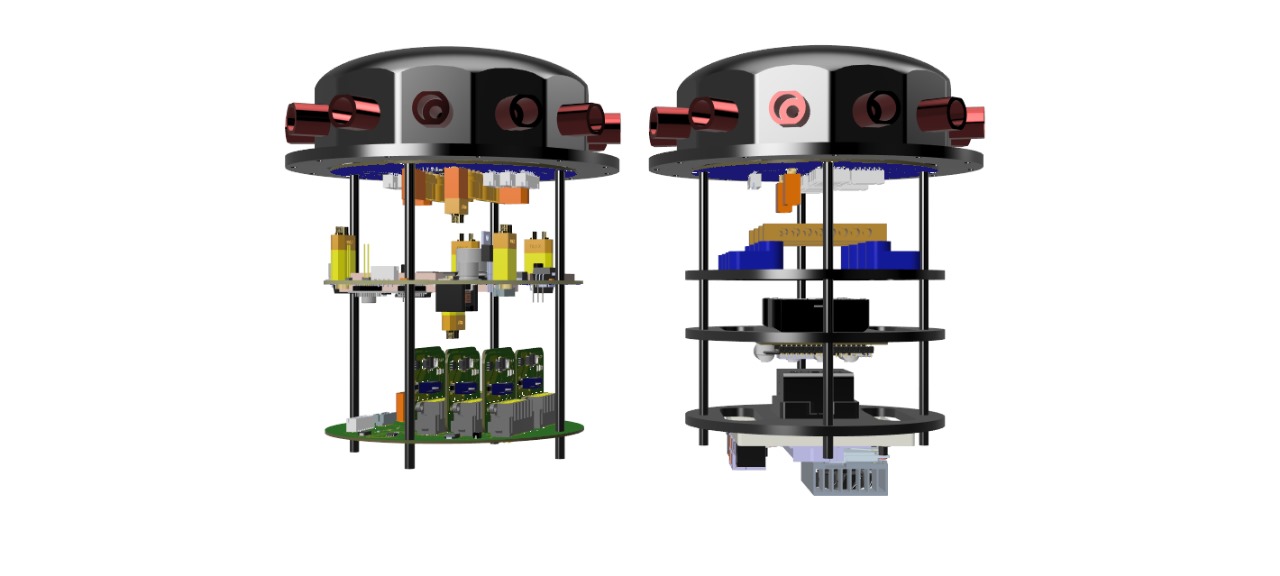
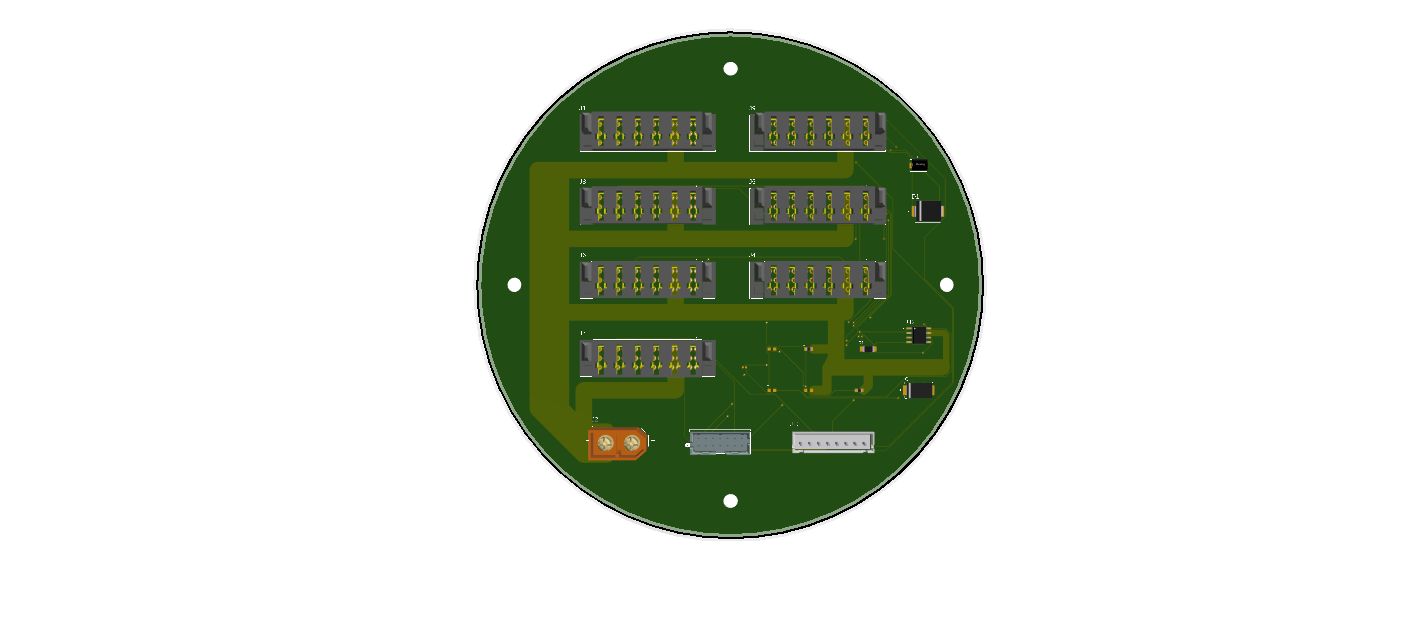
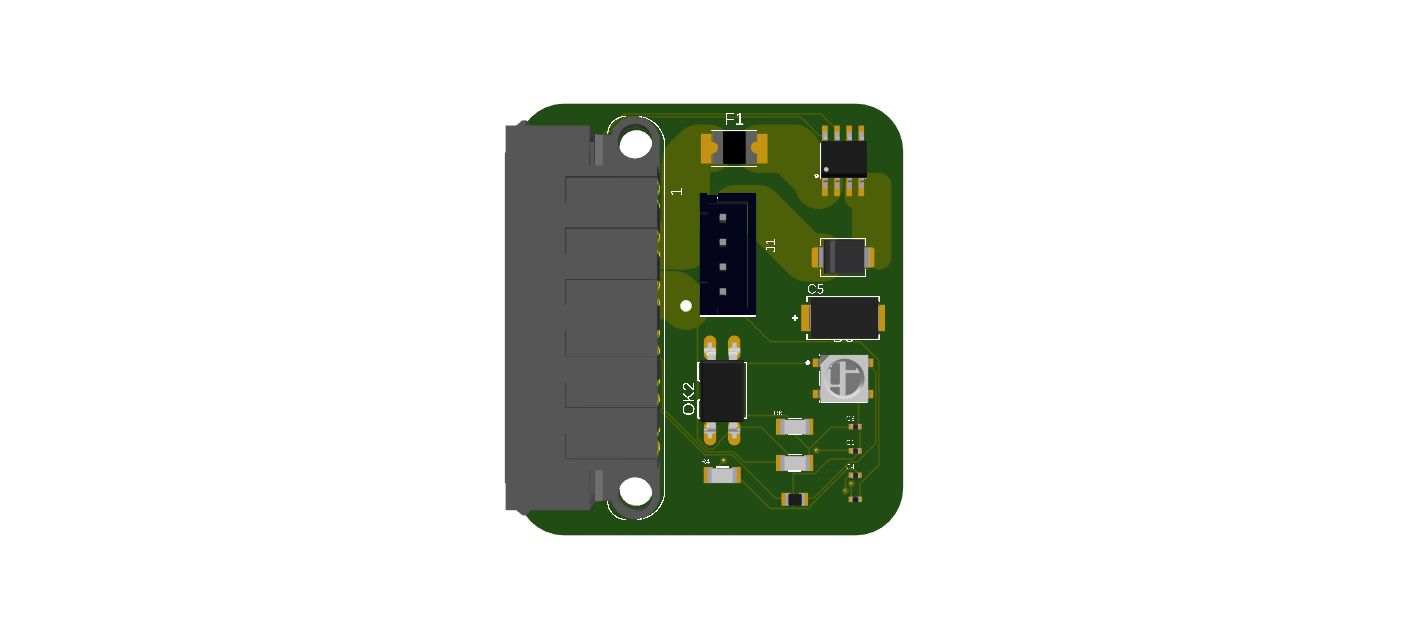
The Peixonauta AUV has been given a new internal layout aiming at modularity, ease of maintenance and better thermal dissipation. Its components have been distributed in two aluminum cylinders: one dedicated to the control and the other to the actuators and the power management board. The propulsion system has been organized in Backplane and Daughter Boards for power distribution and control signals. The batteries have been reformulated in two independent and hot-swappable packs, stored in titanium cylinders with integrated BMS. This new arrangement ensures greater energy efficiency and continuity of operation during recharging.
ELECTRICAL ARCHITECTURE
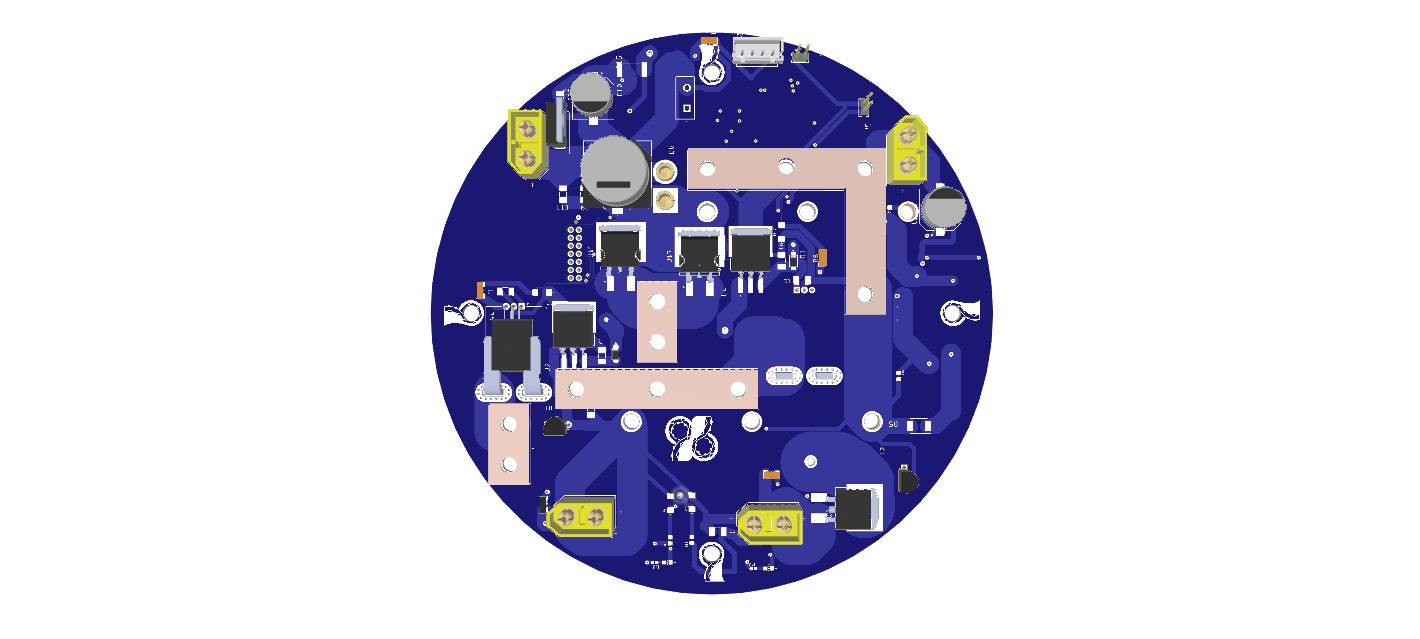
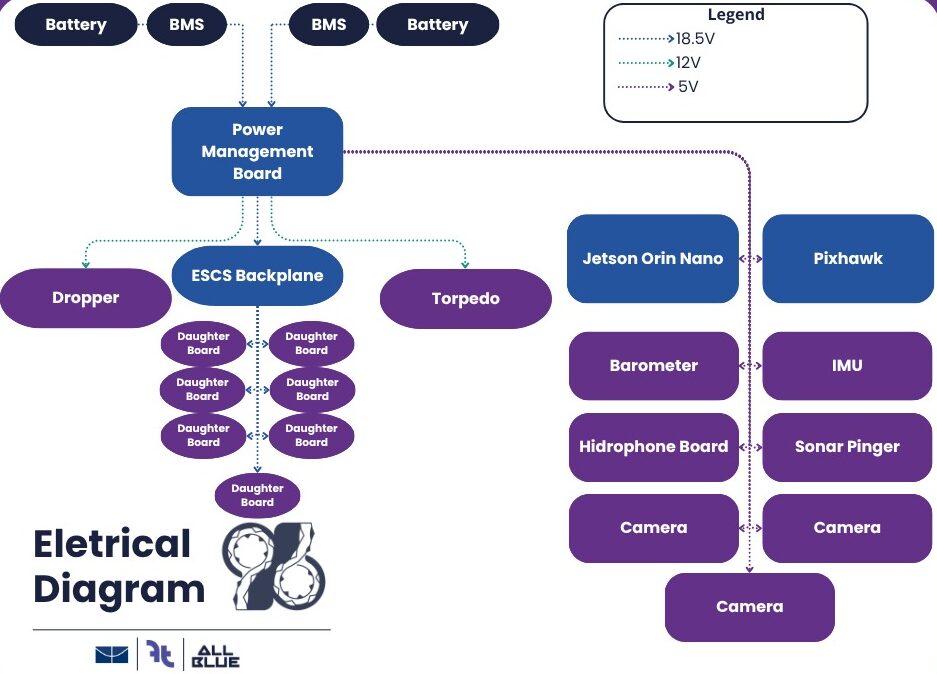
The internal structure is divided into two cylinders: the control cylinder houses the Jetson Orin, responsible for navigation and computer vision, and the Pixhawk, which processes the sensors and controls the actuators. The power cylinder houses the thrusters, the PMB and the drive electronics. The thrusters are controlled by a central Backplane board that distributes power and signals to the Daughter Boards, connected by easy-to-connect connectors. Noise filters and decoupling capacitors were applied to ensure signal integrity and stability in power delivery.
BATTERY SYSTEM
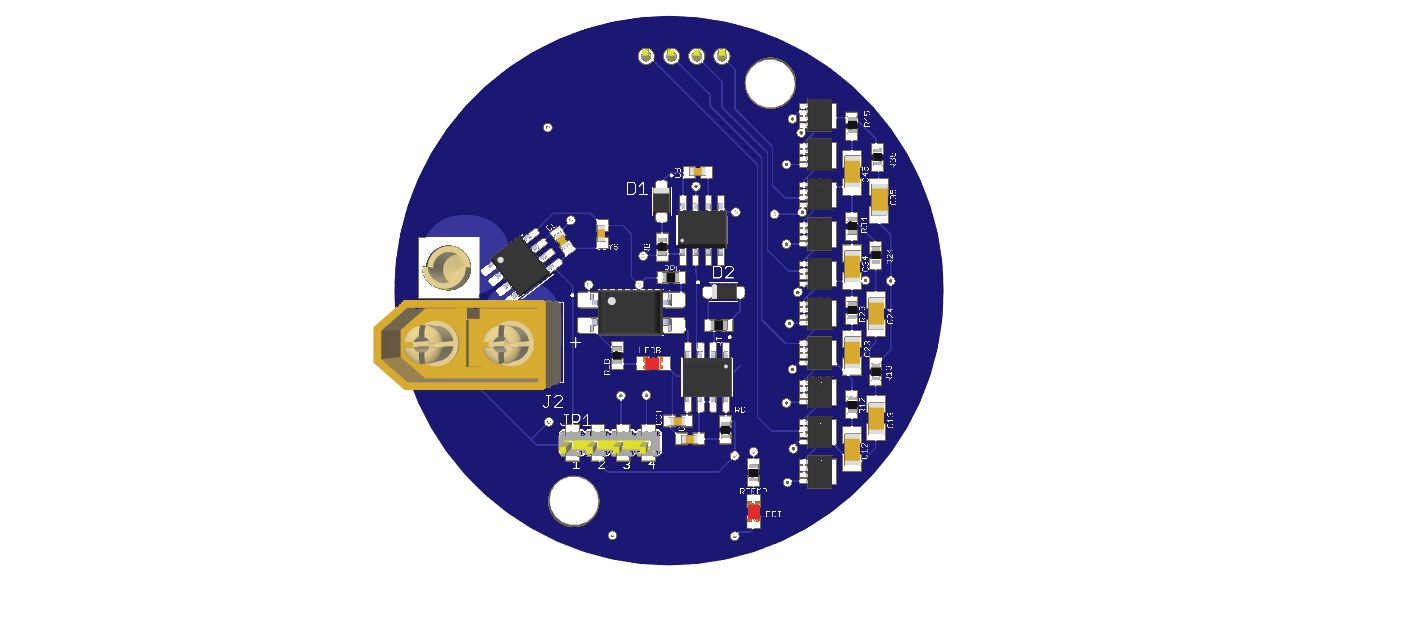
The system uses two 18.5 V, 20 Ah lithium-ion battery packs, stored in titanium cylinders with an independent BMS, allowing for hot-swapping without turning off the AUV. The BMS monitors data with an ESP32, performs balancing using a switched capacitor technique, and protects against overloads. The new Power Management Board manages power input and output, regulating voltages of 5 V, 12 V, and 18.5 V. A fan has been added to cool the regulators and maintain thermal stability during continuous operation.
SOFTWARE SYSTEM
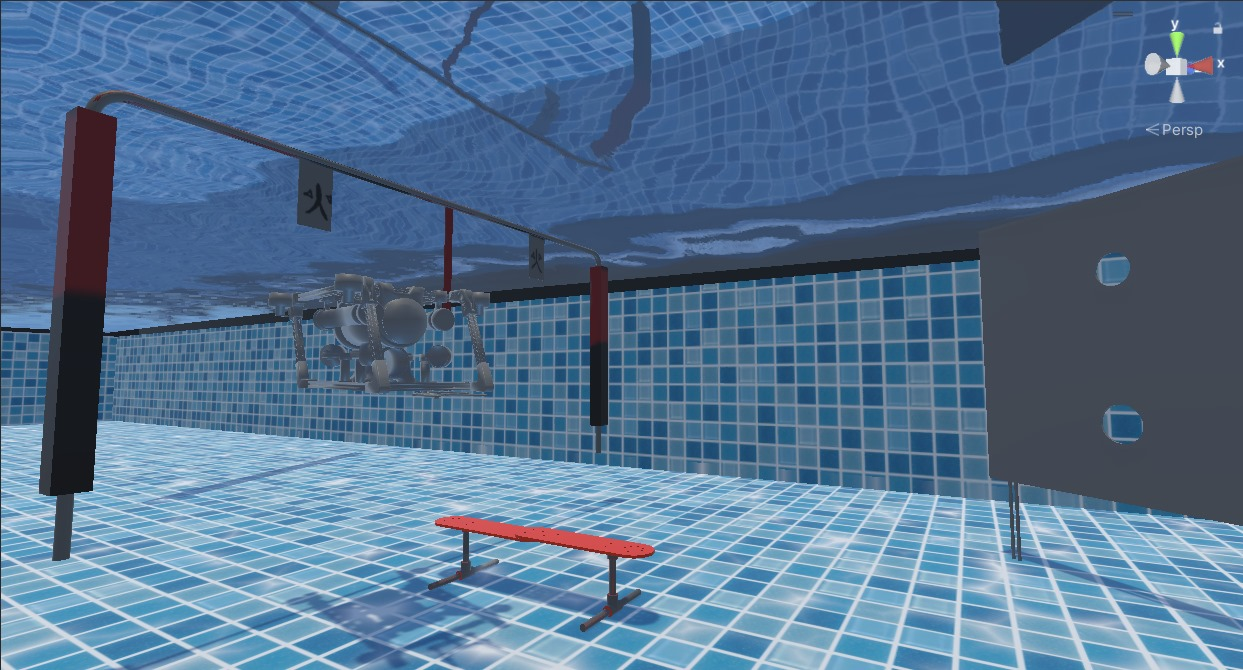
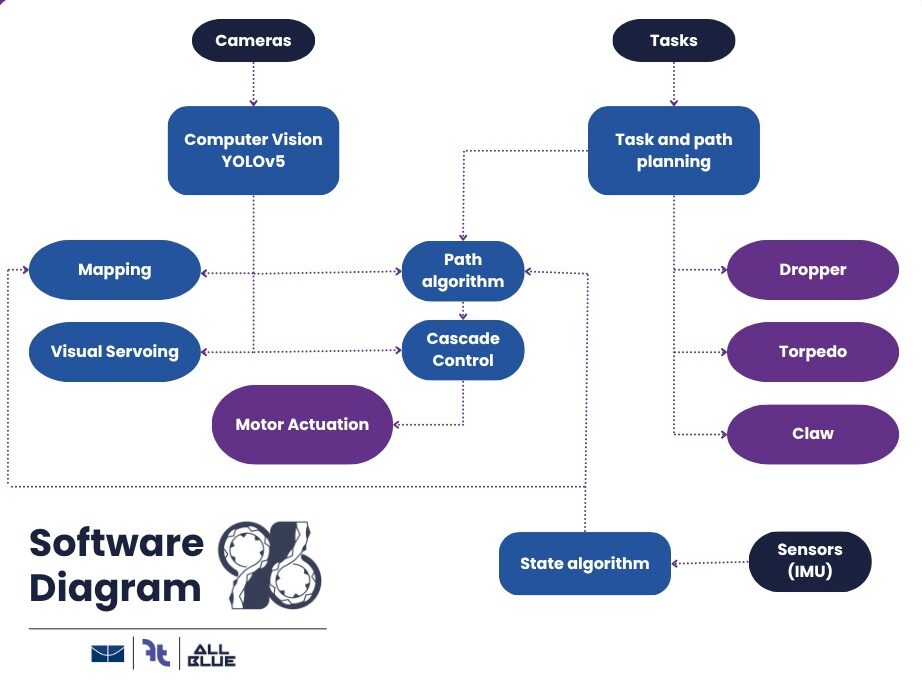
Peixonauta maintained the integrated simulation environment between Unity and ROS, allowing realistic tests with simulated hydrodynamic physics and sensors. Autonomous navigation was improved with real-time 3D mapping and more accurate neural networks for computer vision. The control system was restructured to operate with seven thrusters, maintaining stability and precise response. The mission logic is organized by a modular Behavior Tree structure. These advances allow for greater robustness and flexibility in the robot’s strategies in different underwater tasks and scenarios.
VISION AND MAPPING
The vision system has been upgraded with the YOLOv5n network on Jetson Orin, offering greater accuracy in real-time detection of small objects. This network is complemented by HSV segmentation, increasing robustness in different lighting conditions. Detection data is integrated into a Behavior Tree, guiding the AUV’s actions. For mapping and navigation, RTAB-Map is powered by stereo cameras, IMU and pressure sensor, creating 3D maps of the environment in real time and enabling safe trajectory planning with obstacle avoidance.
CONTROL
The AUV control was adjusted to seven thrusters, maintaining stability and efficiency. The architecture uses Visual Servoing to align the vehicle with detected targets, based on the inversion of the camera’s intrinsic matrix. An Extended Kalman Filter estimates visual parameters in real time, generating commands that minimize positioning error. The control structure is implemented in ROS, ensuring fluid integration with other systems and adaptability to different task conditions.